Motivation: sampling-based MPC lacks of theoretical understanding
Sampling-based MPC becomes prevalent in motion planning and model-based RL for its flexibility and parallizability.
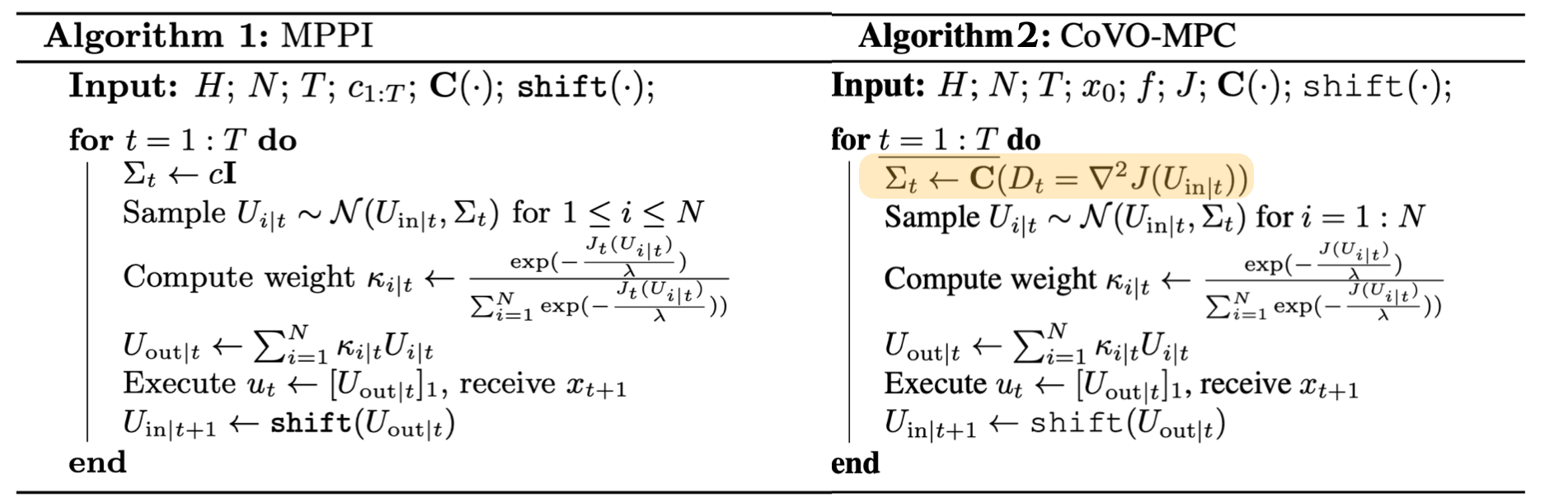
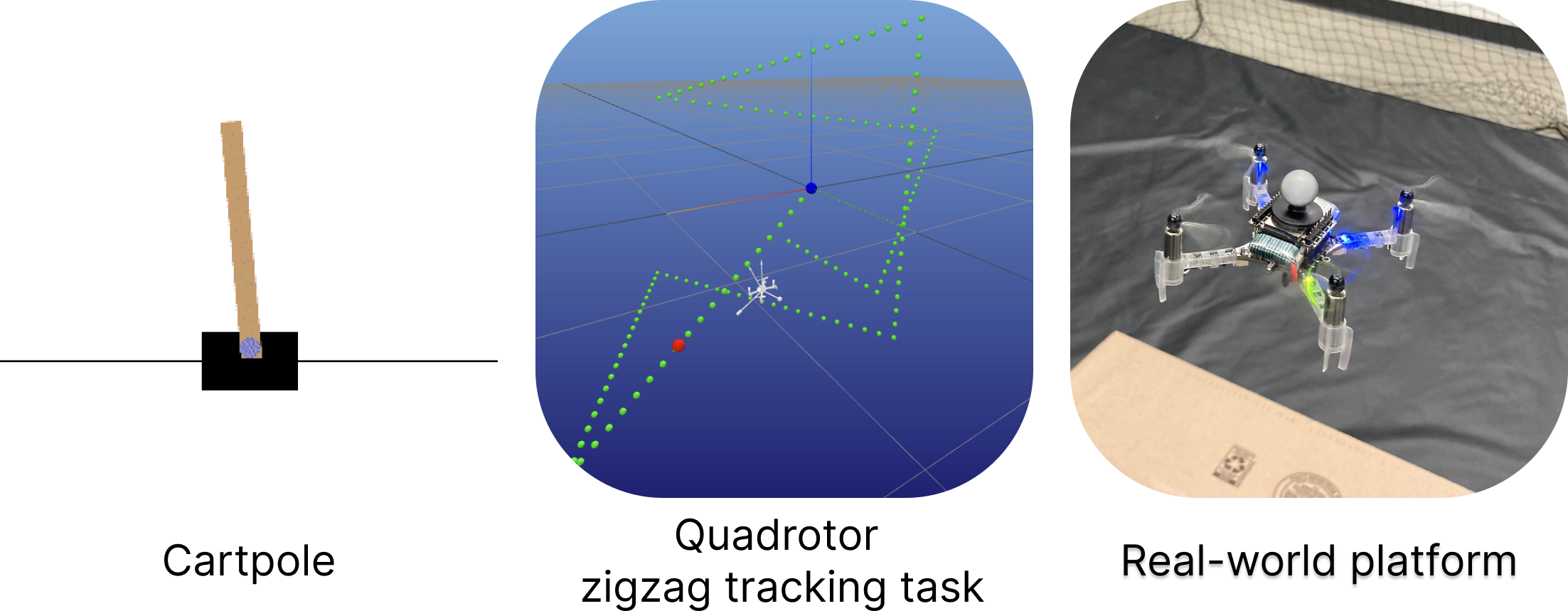
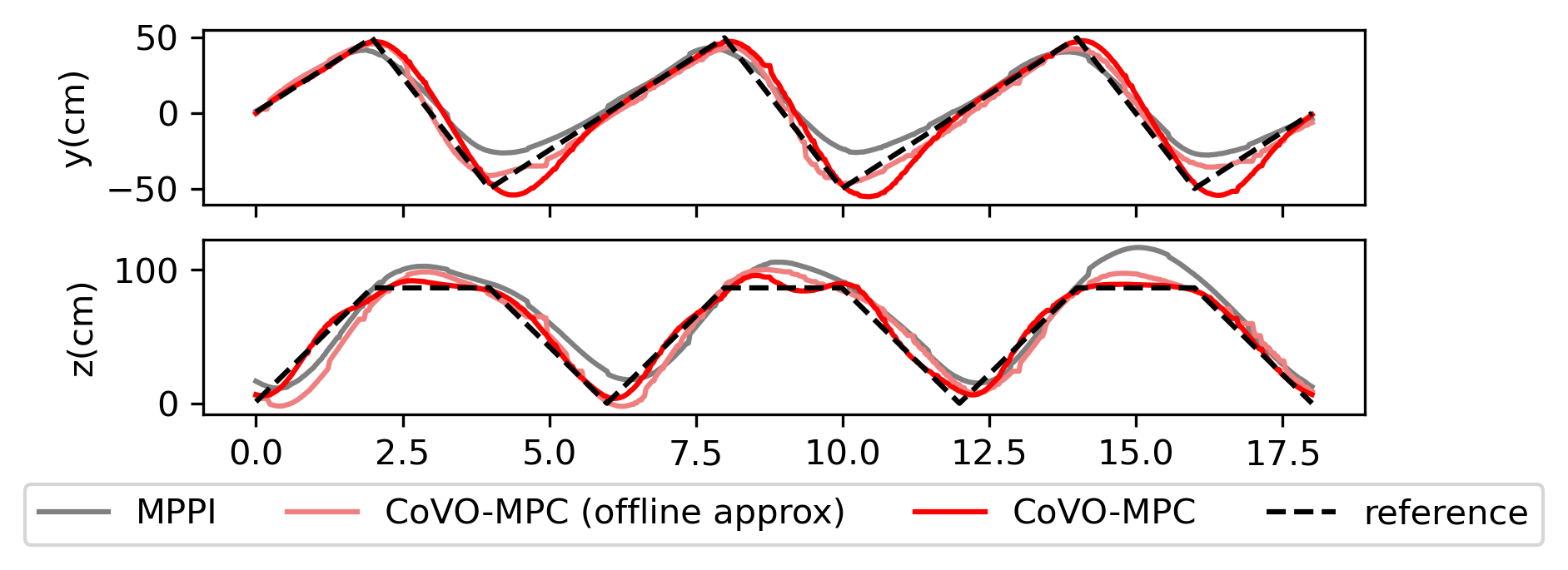
The following figure shows different sampling strategy of CoVO-MPC and MPPI controlling a 2d drone. Both algorithm do a receding-horizon control by sampling trajectories (the green area) at each time step.
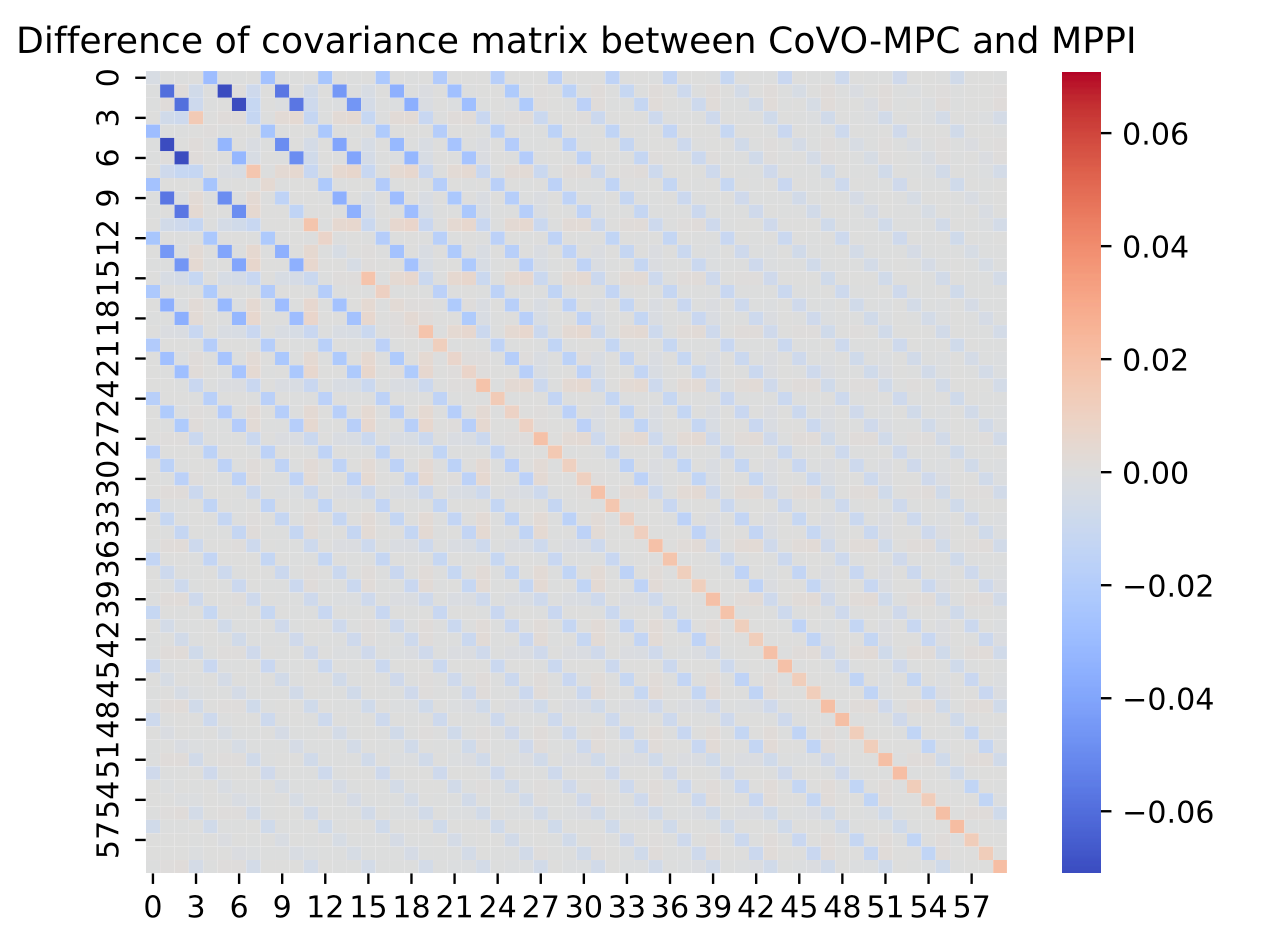
However, there is no convergence analysis to it, which leads to tune hyperparameters heuristically. For instance, MPPI use dynamic-agnostic isotropic Gaussian to sample trajectories, which leads to sub-optimal performance.